并聯機器人如今被廣泛應用于食品、制藥、電子、日化等行業,并聯機器人如何在機器人市場異軍突起,又經歷了什么樣的故事?讓我們隨著阿童木機器人這家專注并聯十五年的企業,共同回顧并聯機器人的發展史。
上世紀八十年代,一類以并聯機構為主機構的新型工業機器人(并聯機器人)為某些特定工業領域不斷提供出更為完美的解決方案,引起工業界和學術界的普遍關注。
在各種各樣的并聯機器人種類中,存在一類由外轉動/移動副驅動、含平行四邊形支鏈的并聯機器人(又稱為并聯機械手)。這類機器人因可將驅動裝置布置在靜平臺(機架)上,而且從動臂多采用輕質細桿制作而成,故末端動平臺可獲得很高的運動速度和加速度,特別適合于高速物流生產線上物料的分揀、搬運和抓放等操作,因此逐漸成為近年來研究和開發的熱點。
而高速并聯機器人的研究,最早追溯到Clavel 博士于1985 年發明的Delta 機械手。該機器人主動臂由外轉動副驅動,從動臂為平行四邊形結構,末端執行器可在工作空間內實現3 維高速平動。而且,在靜、動平臺間加裝兩端帶有虎克鉸鏈的可伸縮轉軸,可實現末端執行器繞動平臺所在平面法向的單自由度轉動,從而完成對標的物的抓放動作。
并聯機器人從需求到實際市場應用,過五關斬六將,是必然要解決的難題!
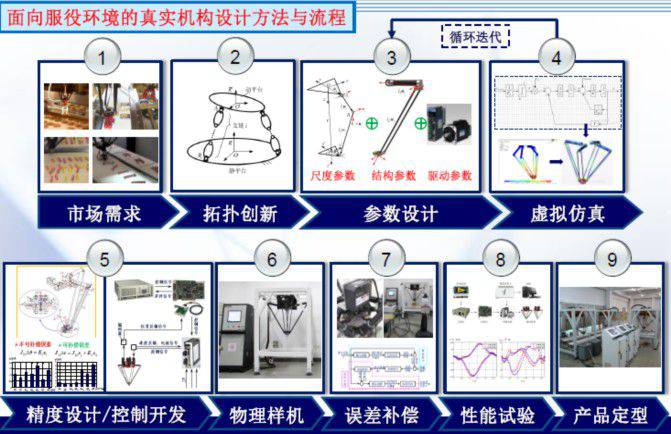
(并聯機器人完美發展攻略)
想要制作能滿足市場需求的并聯機器人成品,先覺性難題是攻克以及掌握高速并聯機械手高速高精作業的技術要點!這也是機器人三大核心技術(控制器、伺服電機、減速機)以外的并聯機器人核心問題。下面我們一起來隨著阿童木機器人這家并聯機器人代表,從技術詳細剖析并聯機器人技術難題。
第一關—拓撲綜合
(拓撲綜合)
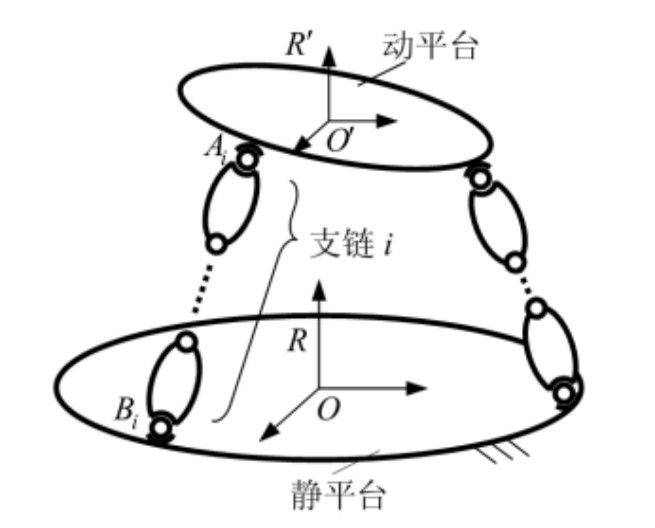
外行看熱鬧,內行看門道,很多初出茅廬或者初入此行的朋友,無疑內心都在吶喊,第一關就這么難啊!這個都是圈圈的圖是個什么東西?看不懂啊!
其實這個叫做拓撲綜合的技術,主要目的是根據需求,發明出能夠滿足動作需求的機構。咱們現在看到的并聯機器人產品,最初都是長得這個樣子的。咱們數學界有一套組合拳來解決這個問題,比如收縮圖理論、組合分析、枚舉論和螺旋理論等。看完只能感慨,數學真偉大!沒有數學這個回旋踢咱們可過不了這第一關啊!并聯機器人同仁們加油!
第二關—參數設計
(參數設計)
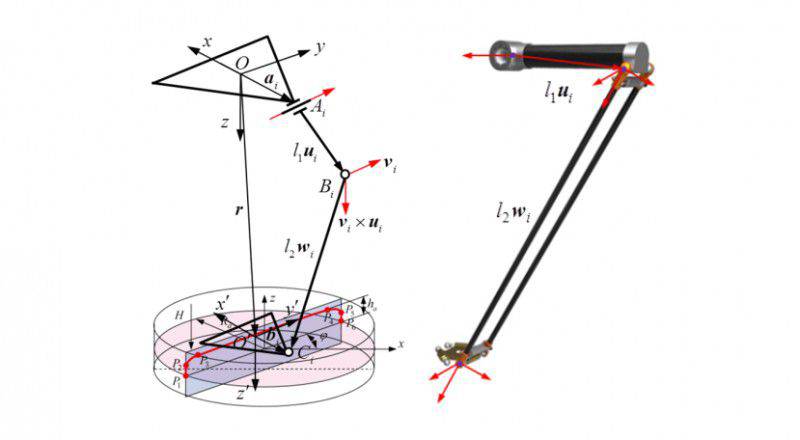
這個看著好像是機器人的形狀了,不過咋還這么多符號呢?一臉茫然。咱們過了第一關,拿到了一個大致能實現需求的機構構型,但這東西沒法用啊!怎么知道輸入輸出的數學關系,怎么確定每個零部件的尺度參數,怎么確定機器人長多大呢?再如何經過訓練讓機構長出肌肉,確定每個零部件的結構參數?又如何確定用多大的力來驅動這個機構運動呢?
從技術上來說,第一步,我們先得用空間向量或者螺旋理論建立描述我們這個機構輸入輸出關系的運動學、動力學模型;第二步,我們需要結合機構的運動特性提煉運動學和動力學方程中的優化目標和約束條件,對機構的尺度參數和結構參數進行優化設計;第三步,我們根據尺度參數和結構參數,通過牛頓歐拉等等數學工具,再確定機構的驅動參數。事實上述過程是這樣的:
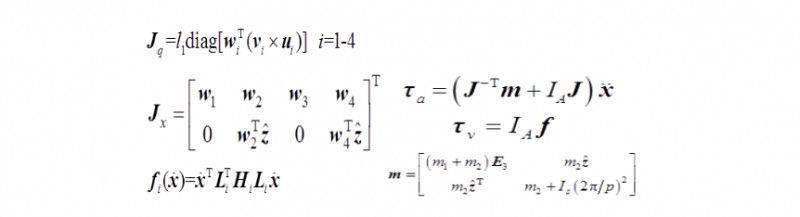
好吧!小白看看就覺得夠神秘!!!!不過好歹第二關終于步步細心的過去了!
第三關—虛擬仿真
那這時咱們可以做樣機了吧?怎么可能!
阿童木機器人,未來的目標定位全球市場!因此滿足國內外標準,先做出真實性數據下的實驗,才是企業生產的前提!于是,還得過第三關-虛擬仿真。