近期在微博熱傳的西班牙公司Aarobot制作出來一個24條機械臂的農業機器人,在今年的草莓季一展身手,現場摘草莓的速度非常驚人,5秒鐘竟然能夠自動識別并準確摘取一個成熟草莓,無損率超過70%,并且可以全天無休止的工作24小時。
為什么歪果仁急切要做一個機器人取代人工呢,在中國這個人口眾多的國家你可能還沒注意到,但是因為“人工短缺”,歐洲國家已經因此在浪費食物!例如英國由于長期依賴外國尤其是歐盟的勞動力,脫歐后帶來嚴重的勞動力短缺,這一影響蔓延至各個領域,比如農場——據預估,如果不抓緊采取措施,英國的草莓田即將有20%的草莓腐爛掉而不是被采摘。一旦英國正式離開歐盟,這一數字還會繼續上升。

最近一二十年,英國對草莓的需求猛增。英國人在1996年消費了多達67,000噸水果,但近年來消費量激增至超過101,000噸。軟水果行業在2015年雇用了29,000名季節性工人,到2020年將需要31,000名季節性工人。鑒于目前的狀況,英國農民聯盟的一份報告顯示,園藝農場屆時所需的水果工人缺口率為12.5%。
讓機器人進行農業采摘最大的挑戰是讓機器人了解,哪些草莓適合采摘、哪些不適合。“沒有哪兩個草莓是一模一樣的,”英國學者Mohan博士說。 “它們有不同的形狀、大小、成熟的順序,許多草莓都隱藏在樹葉中。”
與機器人相比,人類工作者在摘草莓上具有天然優勢:人們能夠迅速將成熟可摘取的草莓與不成熟的草莓分離開來;人們的摘取力度恰到好處,能夠確保草莓能夠完好無損地到達消費者手中。在田間暴露于戶外環境中,是機器人遇到的另一個挑戰,變幻莫測的天氣與它們慣常所在的典型室內環境是非常不同的。
因此,采摘草莓對人類來說可能相對輕松,但對機器人來說卻是一個巨大的挑戰。設計師需要構建一個集視覺、觸覺、力量和運動于一體的系統。系統還必須學會適應動態和高度非結構化的環境。
據了解,本次使用的智慧農業機器人采用履帶式行走布局,超聲波傳感器判斷機身的位置并自動壁障,可以在復雜的地形中工作,在采摘水果的過程中,對水果目標進行智能識別是此項目的核心技術,采取了包括視覺系統在內的多項研究成果。
一般而言,機器視覺主要用計算機來模擬人的視覺功能,從客觀事物的圖像中提取信息,進行處理并加以理解,最終用于實際檢測、測量和控制。視覺傳感器原理一般是利用光學元件和成像裝置獲取外部環境圖象信息的儀器,通常用圖象分辨率來描述視覺傳感器的功能。它的精度不僅與分辨率息息相關,還與被測物體的WD、FOV有關。WD、FOV大,成像精度低;反之,成像精度高。
目前成像主要分為3D視覺傳感技術和智能視覺傳感技術兩大板塊。其間,在當時的視覺體系中,3D立體成像成為研究熱門,無需佩帶立體眼鏡就能看到立體圖畫成為視覺體系的開展方向。而現在所謂的3D電影和游戲并非整整的3D印象,這是因為拍照電影時運用的是單鏡頭攝像機,制造游戲運用的是3D軟件技能,因而,從制造到顯現都是平面的。3D圖象信息的獲取都是根據圖象傳感器獲取、量化圖象信息,這些圖象信息有直接獲取可見光的圖象,也有經過檢測輻射、紅外線、超聲波等不同形式來獲取圖象信息。不同傳感器技能有不同的分辨率、精度和噪聲,我們可從圖象傳感器提取部分有用的信號進行剖析使用。
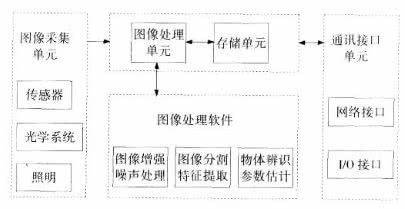
而智能視覺傳感技能下的智能視覺傳感器也稱智能相機,是近年來機器視覺領域開展最快的一項新技能。智能相機是一個兼具圖畫采集、圖畫處理和信息傳遞功用的小型機器視覺體系,是一種嵌入式計算機視覺體系。它將圖畫傳感器、數字處理器、通訊模塊和其他外設集成到一個單一的相機內,由于這種一體化的設計,降低了體系的復雜度,易學、易用、易維護、安裝便利,更加牢靠安穩。同時體系尺度大大縮小,拓寬了視覺技能的使用領域。一般在車輛整體檢測和連接器檢測等關鍵性以及全方位檢測中使用較多。