我相信大部分人在看蜘蛛俠時,有一個很深的印象,蜘蛛俠的反派包括一位聰明的科學家章魚博士,他使用靈活的機械手臂做出了卑鄙的行為。她的仿生手臂可以投擲物體,幫助她在戰斗場景中快速移動,還有許多其他功能。雖然在現實中還無法實現如此超前的技術,但在弗吉尼亞州漢普頓的NASA蘭利研究中心(Langley Research Center),兩名天才實習生正在研究軟性機器人,比如超級惡棍那令人難以置信的手臂,以便在地球以外的地方生存。

在位于NASA蘭利的創客空間實驗室內,實習生查克·沙利文(Chuck Sullivan)和杰克·菲茨帕特里克(Jack Fitzpatrick)正在通過3D打印柔性硅膠模具開發一系列軟機器人執行器。在他們研究的早期階段,這對搭檔正在研究一系列的特性,以了解如何在太空中建造和使用執行器。沙利文說表示,我們正在研究的是軟機器人在太空探索和組裝方面的可行性。
“機器人”這個詞讓人聯想到金屬手臂和齒輪的形象,而柔軟的機器人執行機構則受到了生物啟發,著眼于大自然創造新機器人運動的方式。由于由高度靈活的材料制成,軟機器人能夠像活的有機體一樣運動,這使得傳統的簡單機器人無法實現的新運動范圍成為可能。這些執行器的空間應用可以擴大機器人在探索和裝配中的作用。
杰克說:“當你啟動這個軟機器人時,它會改變你使用材料屬性的方式。一塊橡膠從平面變成手指的形狀,它把材料變成了別的東西,完全超越了金屬的地位!”

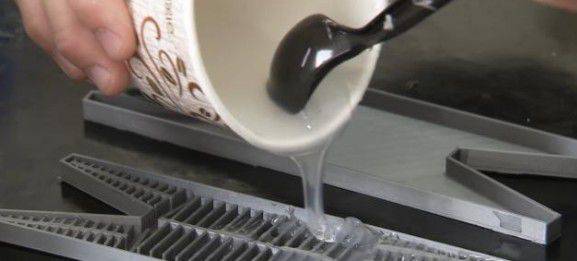
在研究的早期階段,沙利文和菲茨帕特里克正在研究一系列的特性,以了解如何在太空中建造和使用執行器。他們目前的工藝是3D打印一個模具,然后倒入像硅樹脂這樣的柔韌物質,創造出一個柔軟的機器人執行器。根據設計,執行機構有腔室或氣囊,可以根據里面的空氣量進行膨脹和壓縮。
目前,這兩名實習生正在通過氣囊中的一系列管道來操作設計,讓他們能夠控制機器人的運動。通過調節軟致動器腔內的空氣量,機器人可以像人的肌肉一樣彎曲和放松。
軟機器人是一個相對較新的概念。事實上,沙利文和菲茨帕特里克都是這個領域的新手。計算機工程師兼首席研究員James Neillan和聯合首席研究員Matt Mahlin共同開發了這個實習生項目,以研究軟性機器人在太空中的生存能力。
創建執行器只是第一步。沙利文和菲茨帕特里克從“歸零地”開始,研究這項技術如何在太空中用于組裝和探索。從他們的調查中,他們希望能看到軟機器人在未來的其他應用。要做到這一點,他們需要創造執行機構的設計和測試他們在一系列的實驗。
作為研究人員,這兩位實習生確定了關于執行器性能的四條研究方向:可移動性、連接性、平整度和成形性。基于這些特性,沙利文和菲茨帕特里克計劃確定軟機器人在太空探索和組裝中的潛在用途和局限性。
第一個是移動性,研究執行器如何移動。例如,在月球表面移動。連接,作為第二個關鍵屬性,是至關重要的理解探索如何機器人將聯鎖和連接在一起。兩個軟機器人可以連接在一起,形成一個巨大的臨時庇護所。
第三個特性是水平,執行器如何成功地創建或調整所需的表面,比如臨時填充月球棲息地模塊下的空間。“它不必是平坦的平原。它可以是其他一些表面形狀,”菲茨帕特里克說。
最后,第四個特性是加強,它著眼于通過使用氣囊加壓來增加材料的強度。沙利文說:“我們使用執行器讓這個軟機器人進入一個位置,然后用干擾技術把它鎖定在一個位置。”這種技術可以用來被動地加強另一種結構,比如防塵罩。
“我們認為這四件事是問題的關鍵。一旦我們能夠在單獨的單元測試中完成這些,我們就會想辦法將它們結合起來,所以我們可能會將移動性和連接結合起來。”蘇利文解釋道。
菲茨帕特里克表示,他們希望在“危險、骯臟或枯燥”的情況下使用軟機器人,幫助宇航員在太空和其他行星上生活時保持安全和高效。
