為了有效地導航周圍環境,機器人通常根據預先設計的運行環境和傳感器收集的觀測結果來規劃路徑。雖然這種導航策略在簡單和靜態的環境中很有用,但在更復雜和不可預測的策略(例如在現實世界中發現的策略)中卻遠非理想。
在辦公室重復配置的簡單示例。圖片提供:Nardi&Stachniss
實際上,即使饋送給機器人的地圖經過精心編譯且準確無誤,也無法解決意料之外的障礙或環境變化。由于大多數最終應在其中部署機器人的環境(例如醫院,購物中心,機場等)都是高度不可預測且瞬息萬變的,因此主要依賴于預先設計的地圖的導航方法可能會導致軌跡和導航策略不佳。
意識到這一問題,波恩大學的兩名研究人員最近開發了一種方法,該方法可以使機器人在更長的時間內更有效地導航迅速變化的室內環境。在arXiv上預先發表的一篇論文中提出的這種新方法,實質上是通過捕獲環境變化方式的重復模式并利用此知識來做出明智的導航決策而起作用的。
進行這項研究的研究人員之一洛倫佐·納爾迪(Lorenzo Nardi)表示:“這項研究的想法是,室內空間的許多變化都是在重復空間模式之后發生的,例如門同時打開和關閉。” “在這些環境中部署了較長時間的機器人可以觀察并不斷收集有關它的信息,并利用這些知識來計劃更好的導航策略。”
在先前的研究中,同一研究人員開發了一種方法,該方法收集有關地形如何影響機器人在戶外導航的信息,然后使用它來計算軌跡,以最大程度地減小機載振動和功耗。在他們的新研究中,他們決定通過預測環境,實現隨著時間的推移所采用不同配置的技術,從而使其專注于室內機器人導航。
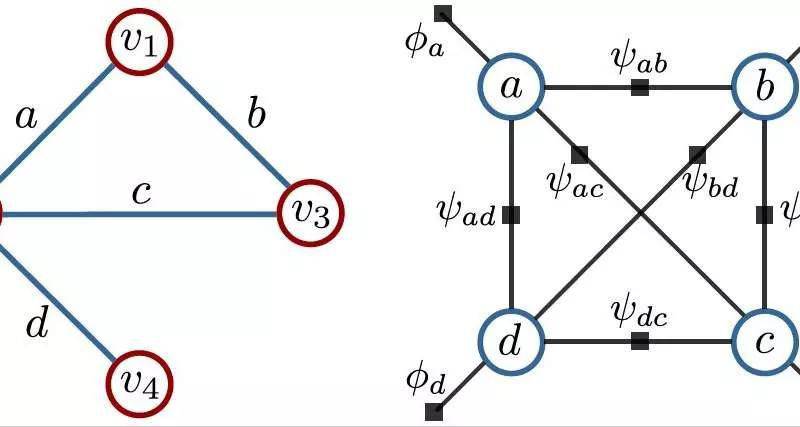
研究人員在工作中使用的示例拓撲(左)和概率圖形模型(右)圖片提供:Nardi&Stachniss
他們開發的方法旨在通過對動態環境變化的模式進行建模并利用此信息來規劃機器人的路徑來增強機器人的室內導航。因此,機器人可以在到達指定位置的路徑上,找到能遇到較少的障礙和阻塞的通道。
Nardi解釋說:“我們方法的主要優點是它考慮了一種能夠連續整合有關環境的新觀察結果的環境表示。” “與基于環境構建靜態幾何圖的貪婪最短路徑規劃者相比,這種導航方式可以隨時間規劃更好的軌跡。”
研究人員通過將其應用于四種不同室內環境中的一系列場景來評估他們的方法:小型辦公室,中型辦公室,大型辦公室和醫院。在這些實驗中,他們的方法表現出色,計劃了考慮環境變化的有效路徑。此外,他們將他們的方法與基于靜態地圖的現有技術進行了比較,發現當機器人部署時間更長時,它會生成更短和更好的路徑。

Nardi說:“我們的研究表明,盡管導航系統的復雜性有所增加,但我們的方法會逐步引導機器人提供有關環境配置的準確預測,并利用這些知識沿較短的路徑導航。”
將來,Nardi和他的同事Cyrill Stachniss提出的方法可能有助于在快速變化的室內環境中增強機器人導航。在醫院等對機器人效率至關重要的環境中,它可能特別有用。研究人員現在計劃使用一個實際的機器人平臺來測試他們的方法,因為這最終將能夠評估驗證他們的發現是否正確,并確保使他們的技術能適用于現實生活場景中。
Nardi說:“未來研究的另一個有趣的方向可能是嘗試將高頻動態行為(例如其他移動的動態主體)整合到框架中。”一旦成功,這將為室內的導航技術帶來一個新的提升和改變。
