弗吉尼亞大學工程學院的機械工程師與哈佛大學的生物學家領導了一項合作,他們創造了第一種被證明能模仿活黃鰭金槍魚的速度和運動的機器魚。
他們的同行評議論文《金槍魚機器人學:探索游動魚類行為空間的高頻實驗平臺》于2019年9月18日發表在《科學機器人學》雜志上。這項機器人金槍魚計劃是由美國海軍研究辦公室發起的,授予巴特·史密斯的一項為期五年、耗資720萬美元的多學科大學研究計劃,該計劃由uva工程機械和航空航天工程系教授希拉里·巴特·史密斯(hilary bart smith)領導,為了研究不同魚類的有效水下驅動。
巴特·史密斯(bart smith)項目的目的是更好地理解魚類推進的物理學,這項研究最終可能為下一代水下機器人的發展提供信息,這種機器人由比螺旋槳更好的類魚系統驅動。
水下機器人在國防、海洋資源勘探、基礎設施檢測和娛樂等領域也有著廣泛的應用。然而,在以生物為動力的推進系統能夠在有人和無人駕駛車輛上用于公共和商業用途之前,研究人員必須,也只能夠先可靠地了解魚類和其他生物是如何在水中移動的。
“我們的目標不僅僅是制造一個機器人。“我們真的很想了解生物能夠遨游水下的科學原理,”巴特·史密斯說。我們的目標是建立一些理論依據,同時我們可以根據是什么使生物游泳者如此快速和高效來測試假設。”
這個團隊首先需要研究高性能游泳運動員的生物力學。哈佛生物學教授喬治勞德和他的研究團隊精確測量了黃鰭金槍魚和鯖魚的游泳動力學。利用這些數據,巴特·史密斯和她的團隊、研究科學家朱建中(音譯)和博士生卡爾·懷特(音譯)建造了一個機器人,它不僅像魚一樣在水下移動,而且能以足夠快的速度拍打尾巴,達到幾乎相等的速度。
然后他們將他們命名為“tunabot”的機器人與活體標本進行了比較。
“關于魚類機器人的論文很多,但大多沒有太多生物數據。因此,我認為這篇論文在機器人工作質量和結合成一篇論文的生物數據方面都是獨一無二的,”勞德說。
用粒子圖像測速技術在流動槽中測試tunabot的視頻,一種測量流量的激光光學測量技術
巴特·史密斯說:“我們在論文中所展示的結果令人驚奇的是,生物學和機器人平臺之間的相似之處,不僅在游泳運動學方面,而且在速度、尾拍頻率和能量表現之間的關系方面。”這些比較讓我們對自己的平臺充滿信心,并有能力幫助我們更多地了解生物游泳的物理學。”
該團隊的工作建立在uva工程在自主系統方面的優勢之上。機械和航空航天工程系是uva engineering網絡物理系統鏈接實驗室的參與者,該實驗室專注于智能城市、智能健康和包括自主車輛在內的自主系統。
Tunabot項目是Bart Smith在海軍研究辦公室提出的第二個具有高度競爭力的多學科大學研究計劃的成果;2008年,Bart Smith獲得650萬美元的獎金,用于開發一個以螳螂射線為模型的水下機器人。
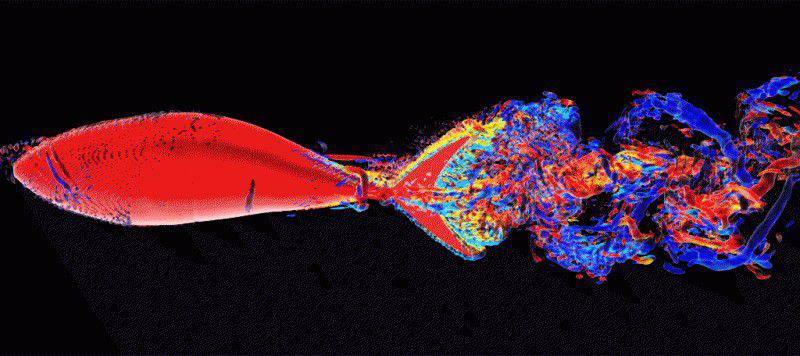
金槍魚的尾鰭如何擺動的圖片。來源:Zhu et al., Sci. Robot. 4, eaax4615 (2019)
tunabot的測試在uva工程公司的機械和航空航天工程大樓的一個大型實驗室進行,在一個大約占房間四分之一的水槽中進行,在哈佛大學的一個類似的設施中進行。這種無眼、無鰭的仿魚機器人大約有10英寸長;生物等效物的長度可達7英尺。釣魚線系繩使機器人保持穩定,而綠色激光則穿過塑料魚的中線。激光測量機器人每掃一次裝配好的尾巴所釋放出的流體運動。隨著水槽中水流的加速,金槍魚的尾巴和整個身體以快速彎曲的方式移動,類似于活的黃鰭金槍魚游泳的方式。
“我們在迄今為止的魚類機器人學文獻中看到,確實有其他人制作的偉大系統,但數據在測量選擇和呈現方面往往不一致。這只是目前機器人領域的現狀。我們關于Tunabot的論文很有意義“我們在迄今為止的魚類機器人學文獻中看到,確實有其他人制作的偉大系統,但數據在測量選擇和呈現方面往往不一致。這只是目前機器人領域的現狀。我們關于tunabot的論文意義重大,因為我們的綜合性能數據設定了很高的標準。
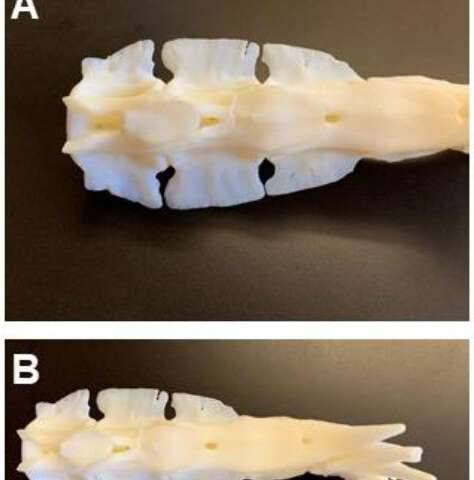
尾鰭骨骼(尾鰭附著的區域)為3D打印(來源:Zhu et al., Sci. Robot. 4, eaax4615 (2019))