據韓媒報道,韓國研究基金會于9月12日發布消息稱韓國科學技術院(KAIST)史蒂夫樸·金教授研究組開發了可區別刺激的三維表面涂層機器人皮膚技術。
具有與人類機能相似的類人機器人一直都是機器人領域的核心研究課題之一,KAIST研究組研發了在復雜的機器人外表可以均勻噴涂的機器人皮膚,均勻的涂層是測定皮膚刺激的核心技術。
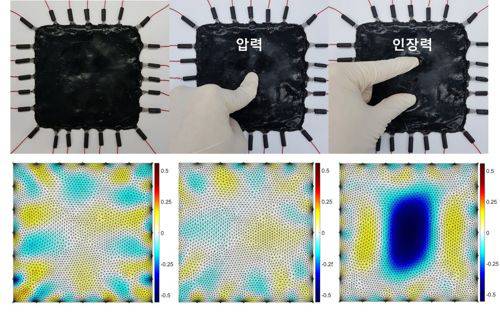
研究組將研發的溶液噴灑在物體上,過一會變硬之后生成多孔性構造的機器人皮膚。機器人皮膚溶液是由碳納米管,水,碳性綜合體混合制作而成。具備造價低·大面積·可大量生產的要素。
這種機器人皮膚可以區分物理性的壓力和摩擦。因為垂直壓力和摩擦,機器人皮膚內部構造各有不同的變形。像是被捏被拉扯機器人皮膚摩擦加大情況下氣孔內部發生微小裂痕,使阻力增加。壓力增加的話氣孔會變硬,結構體內電流流動渠道的變化最小化。就是說這個機器人皮膚在壓力下會遲鈍,在摩擦下會敏感。
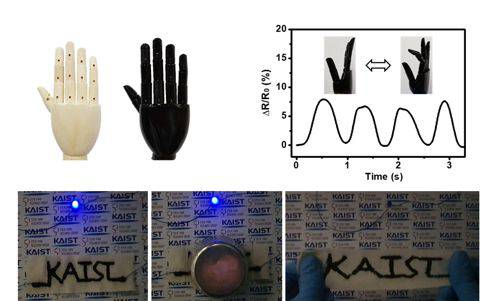
研究組表示這個技術被應用的可能性很高,機器人皮膚技術已經與醫學里的電阻抗成像相結合。電阻抗成像是人體內不同組織在不同的生理、病理狀態下具有不同的電阻/電導率,采用各種方法給人體施加小的安全驅動電流/電壓,通過驅動電流或電壓在人體的測量響應信息,重建人體內部的電阻率分布或其變化的圖像。研究組解釋說。沒有復雜的電氣排線,可以正確測量機器人皮膚摩擦加大的地方。
研究組史蒂夫·樸教授表示“這款與其他機器人皮膚不同的是造價低,可大量生產,使機器人皮膚商用化更近了一步”。