記得擁抱人類的大白嗎?擁抱對于機器人是機器困難的一件事,如果機器人自主擁抱人類或者人類握手互動,那或許是因為它想得到一塊人類小餅干。機器人對于力的感知和控制,是科學家認為阻礙類人型機器人突破的最大瓶頸。

敏感的合成皮膚使機器人能夠感知自己的身體和周圍環境,這是機器人與人緊密接觸時的一項至關重要的功能。受到人體皮膚的啟發,慕尼黑工業大學(TUM)的一個團隊開發了一種將人造皮膚與控制算法結合在一起的系統,并用它創建了第一臺具有全身人造皮膚的自主人形機器人。
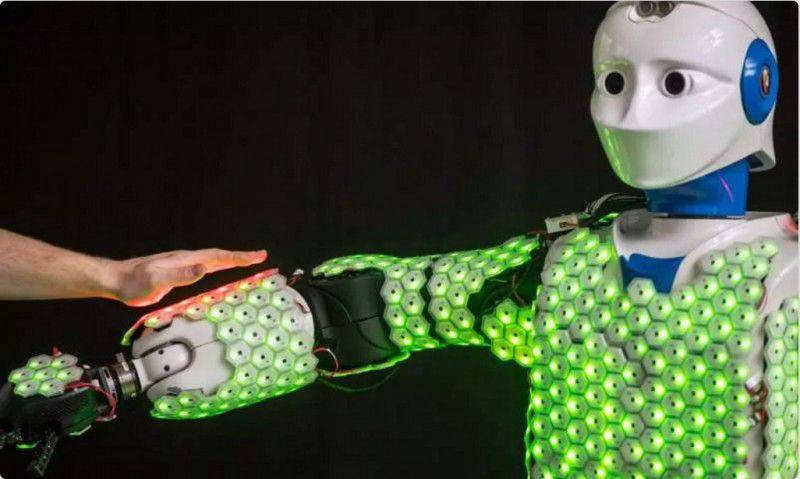
由Gordon Cheng教授及其團隊開發的人造皮膚由六角形細胞組成,其大小約為2歐元硬幣(即直徑約1英寸)。每個都配有微處理器和傳感器以檢測接觸、加速度、接近度和溫度。這種人造皮膚使機器人能夠更詳細,更靈敏地感知周圍環境,這不僅幫助他們安全移動,這也使它們在人附近操作時更安全,并使他們能夠預測并積極避免事故發生。
由慕尼黑工業大學(TUM)的研究人員開發的這種人造皮膚的每個細胞都配備有微處理器和傳感器,以檢測接觸,加速度,接近度和溫度,新的控制算法使首次將人造皮膚應用于人類大小的機器人成為可能。

圖片來源:Astrid Eckert / TUM
表皮細胞本身是由戈登·程,慕尼黑工業大學認知系統的教授在10年前開發。但是,本發明僅在將其集成到復雜的系統中時才顯示出其全部潛力,如《 IEEE議事錄》(Proceedings)最新一期所述。
1.通過基于事件的方法提高計算能力
開發機器人皮膚的最大障礙一直是計算能力。人體皮膚約有500萬個受體,傳統系統實現來自人造皮膚中傳感器的數據連續處理能力很快就達到了極限,以前的系統很快就被數百個傳感器的數據所淹沒。
為了克服這個問題,Gordon Cheng和他的團隊使用神經工程方法,不連續監測皮膚細胞,而是使用基于事件的系統進行監測。這樣最多可減少90%的處理工作量。訣竅:僅當值更改時,各個單元才從其傳感器傳輸信息。這類似于人類神經系統的工作方式。例如,當我們第一次戴上帽子時,我們會感到一頂帽子,但是我們很快就習慣了這種感覺。直到風將其從我們的頭上吹走之前,無需再次注意帽子,這使我們的神經系統只需專注于需要身體反應的新印象。這樣確保了即使身體緊密接觸也能確保安全。
通過基于事件的方法,Cheng教授及其團隊現在已成功地將人造皮膚應用于不依賴任何外部計算的人類大小的自主機器人。H-1機器人的上身,手臂,腿部甚至腳底都裝有1260個單元格(帶有13000多個傳感器)。這給它帶來了新的“身體感覺”,例如,H-1的腳靈敏,能夠應對不平坦的地面,甚至可以平衡一只腳。
H-1具有特殊的皮膚,甚至可以安全地擁抱一個人,這聽起來并不簡單:機器人可以施加會嚴重傷害人類的力量,在擁抱期間,兩個身體在許多不同的地方接觸。機器人必須使用這些復雜的信息來計算正確的運動并施加正確的接觸壓力。Gordon Cheng解釋說:“這在工業應用中可能不那么重要,但是在護理等領域,必須設計機器人以使其與人的接觸非常緊密。”
致謝圖源:慕尼黑工業大學
2.多功能而堅固
Gordon Cheng的機器人蒙皮系統也非常耐用且用途廣泛。因為皮膚是由細胞組成的,而不是由一塊材料組成的,所以即使某些細胞停止工作,它也能保持功能。Gordon Cheng說:“我們的系統旨在與各種機器人一起快速無故障地工作。” “現在,我們正在努力制造較小的皮膚細胞,并有可能大量生產。”
圖源:機械姬
未來我們可以與機器人進行肢體交互,機器人也會因此產生反應,這想想就讓科學家很激動。