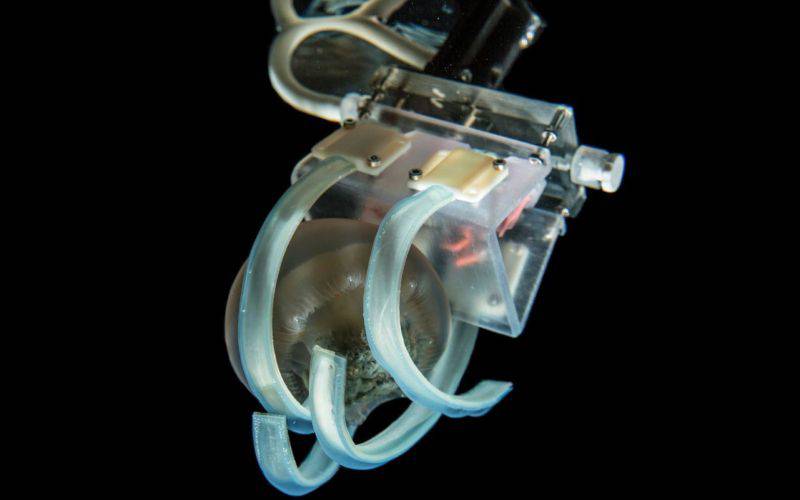
不可否認,至今研發出來的機器人可能都有點笨手笨腳。當機器人在倉庫中搬動箱子時,強有力的抓力是它們的優勢,可是如果在海洋里,這樣就會破壞脆弱的海洋生物,比如水母。不過現在,研究人員想到了一個解決方案。他們創造了一個柔軟的機器手,使用類似“意大利寬面”那樣的硅膠手指,來捕捉和放走脆弱的凝膠狀水母。
水母含有約95%的水分,剩余的5%的部分是非常脆弱的。目前,用于捕獲水母的大多數工具都是為海洋石油和天然氣工業開發的,當這些工具用來捕獲水母時,會經常把水母切碎。相比之下,這些有趣的“硅膠手指”是用水充氣的,也使用了液壓,這使得手指格外柔軟。據研究人員說,它們對水母施加的壓力都不到人類眼瞼對眼睛施加壓力的十分之一。
這個機器手是由哈佛大學威斯研究所和紐約市立大學巴魯克學院合作研發。研究人員前幾日在《科學·機器人》雜志上發表了他們的研究成果。他們指出,研究水母經常會引出重要的發現,比如科學家用于研究基因表達的綠色熒光蛋白(GFP);有些人還認為水母可以教人類如何抗老。
可能水母會不喜歡被面條狀的手指困住,但是它們在這個過程中也沒有受到傷害。研究人員在新英格蘭水族館測試了這個抓手,它們抓住游動的海月水母、馬賽克水母和巴布亞硝水母,這些水母的大小和高爾夫球差不多大。據說,并沒有跡象表明水母受到壓力,而且夾具也能夠在出現磨損的跡象之前打開合上將近100次。
這項技術還可以幫助研究人員收集和研究其他海洋生物,也可以幫助推進對其他柔軟機器人的研究。我們已經看到了那些用于太空探索和醫療保健的機器人。威斯研究所的仿生軟體機器人平臺的共同領導人Rob Wood博士說:“柔軟機器人技術是解決各種領域長期問題的理想解決方案,因為它采用了靈活的材料,將傳統機器人的可編程性和堅固性與前所未有的柔軟性相結合。”