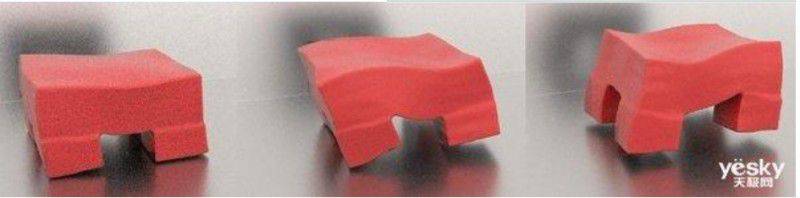
6月11日消息,日前,來自麻省理工學院計算機科學與人工智能實驗室的研究人員開發出了一種專門為軟體機器人設計的新型模擬器,并證明該模擬器能逼真地模擬各種機器人的形態,從爬行機器人到四足跑步機器人。
該模擬器不僅能有效地評估機器人的設計,還能提供如何改進設計的反饋。
“我們相信這個系統有可能大大加速軟體機器人的發展,”Andrew Spielberg說,他是在IEEE國際機器人與自動化會議(ICRA)上發表這篇新論文的合作作者之一。“我們還創建了一個TensorFlow接口,允許各級用戶開發自己的軟體機器人系統,而無需了解模擬器的底層細節。”
《冰雪奇緣》中采用了“材料點法”(MPM)來仿真不同形態的雪。具體來說,新的模擬器使用了一種更快的MPM形式,稱為MLS-MPM,它基于“移動最小二乘”的概念,可以更無縫地集成到推理、控制和協同設計系統中。
新的模擬器采用MLS-MPM,這意味著數值優化器可以有效地搜索最優機器人配置,而且比無導數方法(如強化學習)更快地完成優化。
目前,該團隊的項目專注于彈性設計,但Hu說,未來的工作可以模擬其他材料,如塑料,布料或流體,或者與剛性和柔性環境更復雜的相互作用。
為了能讓機器人執行各種任務,計算機科學家通常會使用一種被稱為物理模擬器的系統,該系統能反映出機器人的行為將如何影響現實世界。然而,當涉及到由柔性、可變形材料制成的軟體機器人時,這些模擬器并不能很好地映射實際情況。這是因為可變形物體的基本物理定律要復雜很多,需要更多的計算能力來模擬,而麻省理工學院開發的新型模擬器有效解決了這一問題。